 اتصالات صنعتی و خانگی
اتصالات صنعتی و خانگی

 تجهیزات فرمان و هشدار
تجهیزات فرمان و هشدار

 تجهیزات حفاظت و سوئیچینگ
تجهیزات حفاظت و سوئیچینگ



 رله کنترلی و نمایشی
رله کنترلی و نمایشی

 تجهیزات اندازه گیری
تجهیزات اندازه گیری
 تجهیزات ابزار دقیق
تجهیزات ابزار دقیق

 تجهیزات راه اندازی موتور
تجهیزات راه اندازی موتور
برای ایجاد هرگونه حرکتی به نیرو نیاز است. در گذشته حرکت مورد نیاز اجسام از نیروهای انسانی و یا برای مثال برای چرخاندن یک آسیاب از نیروی حیوانات استفاده می کردند. اما با گذشت زمان و توسعه روزافزون صنایع و نیاز به ایجاد حرکت دقیق در اجسام بسیار بزرگ، بکارگیری اینگونه نیروها دیگر جوابگو نبود و نیاز به فناوری جدیدی حس میشد. لذا به تدریج انواع موتورهای طراحی شدند که جایگزین مناسبی برای نیروهای انسانی و حیوانی گردیدند.
درواقع موتور الکتریکی، نوعی ماشین الکتریکی است که الکتریسته را به حرکت مکانیکی تبدیل میکند. با اعمال برق به موتور میتوان حرکت ایجاد نمود واین حرکت را به اجسام مختلف اعمال کرد. برای مثال ماشین لباسشویی برای ایجاد حرکت چرخشی از موتور استفاده می کند و یا اتومبیل نیروی موردنیاز برای حرکت خود را از موتور دریافت می کند. با اعمال برق شافت با یک سرعت و دور ثابت شروع به چرخیدن میکند.
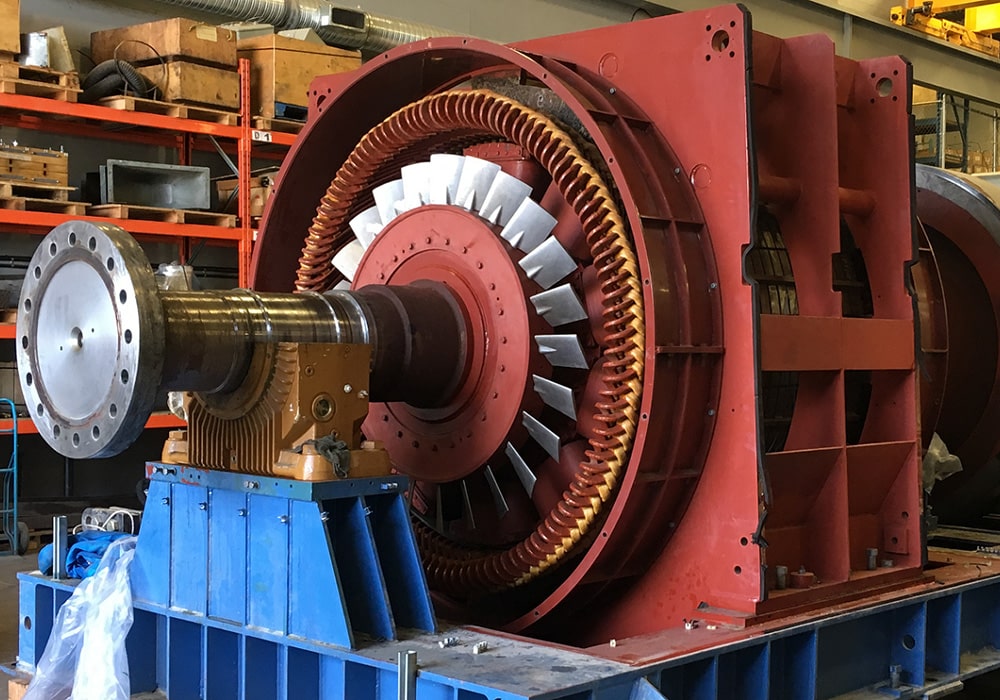
شکل زیر یک الکتروموتور سه فاز را نشان میدهد.

الکتروموتورها در اشکال مختلفی همچون تکفاز، سهفاز، ترمزدار، سنکرون، آسنکرون، موتورهای دو دور، موتورهای سه دور و … با مشخصات متفاوت در دسترس میباشند. برای هر نوع موتور، امکان نصب در حالتهای مختلفی وجود دارد از جمله نصب بر روی پایه، نصب بر روی فلنچ و یا هر. روشهای خنک کردن موتور هم متنوع میباشد، از خنک کردن توسط پروانه انتهای موتور تا روشهای پیچیده مدار بسته آب خنک . برای اطمینان از طول عمر موتور لازم است آن را تحت شررایط صحیح و مناسب محیطی، مورد استفاده قرار داد. دو عدد IP درج شده بر روی پلاک موتور نشاندهنده درجه حفاظت موتور است؛ عدد اول درجه حفاظت در مقابل نفوذ مستقیم جامدات و عدد دوم درجه حفاظت در مقابل نفوذ آب را نشان میدهد.
موتورهای قفس سنجابی
در این مقاله، کانون توجه بر موتورهای قفس سنجابی است که بیشترین تولید و فروش در بین الکتروموتورها را دارد. این نوع موتور نسبتا ارزان قیمت بوده و هزینه نگهداری آن هم اندک است. البته الکتروموتورهای موجود در بازار از بازده، قیمت و کیفیت متفاوتی برخوردار اند. بازده بالا باعث کاهش مصرف انرژی در مدت زمان معمول عمر الکتروموتور میگردد. سطح پایین آلودگی صوتی و قابلیت تحمل محیطهای نامناسب نیز از جمله پارامترهای مورد توجه میباشند.
نوع طراحی رتور، باعث ایجاد تغییرات شدید در جریان راهاندازی و گشتاور خروجی میگردد. استفاده از سافت (DOL) در هنگامی که الکتروموتور دارای گشتاور راهاندازی بالایی در راه اندازی مستقیم استارتر بهتر است. در هنگام راهاندازی یک الکتروموتور با گشتاور راهاندازی بالا، توسط سافت استارتر، مقدار کاهش جریان راه اندازی در مقایسه با الکتروموتوری که گشتاور راهاندازی کمتری دارد، به نحو چشمگیری بیشتر است. تعداد قطبهای موتور نیز مشخصات فنی را تحت تاثیر قرار میدهد. یک موتور دو قطبی دارای گشتاور راهاندازی کمتری نسبت به یک موتور چهار قطبی است.
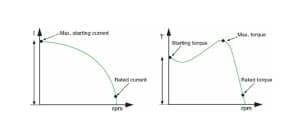
منحنی فوق، نشان دهنده گشتاور و جریان یک موتور قفس سنجابی معمولی نسبت به دور خروجی میباشد.
- ولتاژ
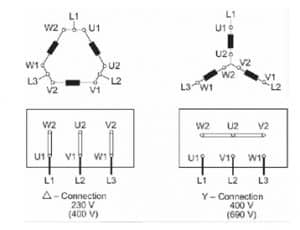
موتورهای سه فاز تک سرعته را معمولا می توان به دو سطح ولتاژ متفاوت متصل نمود. سه سیم پیچ استاتور به صورت (Y) ستاره و یا مثلث (D) بسته میشود. سیم پیچها را نیز میتوان به صورت سری یا موازی متصل نمود. اگر بر روی پلاک الکتروموتور هم ولتاژ ستاره و هم مثلث، ذکر شده باشد میتوان هر دو ولتاژ 220 و 380 ولت را به موتور متصل نمود، اولی به حالت مثلث و دومی به حالت ستاره این دو حالت را در شکل زیر مشاهده میکنید
- ضریب توان
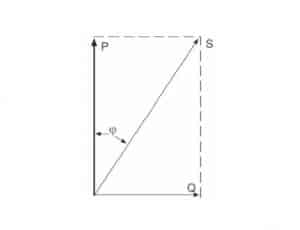
موتور همیشه توان اکتیو مصرفی را به کار مکانیکی تبدیل میکند. توان را کتیو نیز برای ایجاد میدان مغناطیسی مورد نیاز است اما هیچ گونه کار مکانیکی انجام نمیدهد. در شکل زیر توانهای اکتیو و راکتیو با حروف Q و P نشان داده شده که به همراه هم توان حقیقی (S) را ایجاد میکند. نسبت بین توان اکتیو (KW) و توان حقیقی را ضریب توان نامیدهاند و آن را با COS نمایش میدهند. مقدار معمول آن در هنگام کار بین 0٫7 تا 0٫9 است که در موتورهای کوچک کمتر و در موتورهای بزرگ بیشتر است
- سرعت
سرعت در یک موتور AC به دو چیز بستگی دارد: تعداد قطبها سیم پیچ استاتور و فرکانس برق متصل به آن. در فرکانس 50 هرتز سرعت چرخش موتور برابر است با نسبت عدد ثابت 6000 بخش بر تعداد قطبها، در فرکانس 60 هرتز عدد ثابت برابر با 7200 است. برای محاسبهی سرعت موتور می توان از رابطهی زیر استفاده کرد به صورت:
N=(2.f.60)/P
که در آن N نشانگر سرعت، f علامت فرکانس و P بیان کننده تعداد قطبها میباشد. سرعت محاسبه شده از طریق رابطهی فوق، سرعت سنکرون موتور است و سرعت یک موتور قفس سنجابی و یا رینگ لغزشی هرگز به آن نمی رسد. در حالت بدون بار، سرعت به حدود سرعت سنکرون خواهد رسید ولی با افزایش بار از آن فاصله خواهد گرفت. اختلاف بین سرعت سنکرون و سرعت واقعی (سرعت نامی) را لغزش نامیدهاند و مقدار آن از طریق رابطهی زیر محاسبه می گردد:
s=(n1-n)/n1
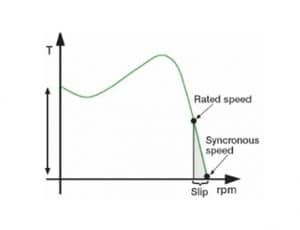
که در آن s مقدار لغزش عددی (1% تا 3%) سرعت سنکرون n1 و سرعت نامیn است.
- گشتاور
گشتاور راهاندازی یک الکتروموتور بستگی مستقیم به اندازه آن دارد. گشتاور راه اندازی یک موتور کوچک (موتور با توان کمتر از 30 کیلو وات) معمولا بین 2٫5 تا 3 برابر گشتاور نامی آن است، در حالی که در موتورهای سایز متوسط تا حدود 250 کیلو وات این مقدار بین 2 تا 2٫5 میباشد. موتورهای بزرگ گشتاور راهاندازی کوچکی حتی کمتر از گشتاور نامی راهاندازی دارند. چنین موتورهایی را بعضا نمیتوان در بار کامل کامل به صورت مستقیم می باشد.
گشتاور نامی یک موتور را میتوان از رابطه ی زیر بدست آورد:
Mr=(9550.Pr)/nr
که Mr گشتاور نامی(Nm)، Pr توان نامی موتور( kw ) و nr دور نامی ( rpm ).