-
 اتصالات صنعتی و خانگی
اتصالات صنعتی و خانگی
در یک مجموعه که دارای یک یا چند شبکه الکتریکی است همواره بحث برقراری اتصالات الکتریکی مطرح است . این اتصالات در واقع متصل کردن تجهیزات و ادوات الکتریکی به یکدیگر است . اتصال تجهیزات الکتریکی به شبکه برق ، اتصال هادیها ، اتصال تجهیزات به یکدیگر و بسیاری از کاربردهای این چنینی همیشه نیازمند واسطههایی برای برقراری ارتباط بین المانهای ذکر شده است . با توجه به کاربرد و نقش و اهمیت تجهیزات الکتریکی در مدارها و شبکهها باید از اتصالات مناسب برای برقراری ارتباط با شبکه و یا سایر تجهیزات بهرهمند باشند . ادوات اتصالات در شبکههای الکتریکی با توجه به سطح ولتاژ شبکه و نیاز به استحکام ، خاصیتهای عایقی ، مقاومتهای حرارتی و سایر فاکتورهای فیزیکی و شیمیایی انتخاب میشوند . کاربردهای مختلفی در صنعت و واحدهای غیر صنعتی برای اتصالات الکتریکی وجود دارد . در حوزه صنعت برای اتصالات ماشین آلات صنعتی ، موتورها ، کابلها ، وسیلههای حفاظتی ، ترانسها ، سیمکشی تابلوهای برق و … لوازم اتصال دهنده مخصوص و متعددی استفاده میشود . آن دسته از اتصالات الکتریکی که در صنعت و در سطح ولتاژی یا مقاومت فیزیکی بالاتری مورد استفاده قرار میگیرد به دلیل بالا بودن تنشهای الکتریکی و مکانیکی در…
-
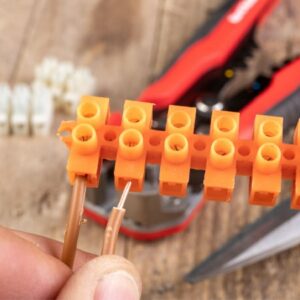
ترمینال شاخه ای
در یک مجموعه که دارای یک یا چند شبکه الکتریکی است همواره بحث برقراری اتصالات الکتریکی مطرح است . این اتصالات در واقع متصل کردن تجهیزات و ادوات الکتریکی به یکدیگر است . اتصال تجهیزات الکتریکی به شبکه برق ، اتصال هادیها ، اتصال تجهیزات به یکدیگر و بسیاری از کاربردهای این چنینی همیشه نیازمند واسطههایی برای برقراری ارتباط بین المانهای ذکر شده است . با توجه به کاربرد و نقش و اهمیت تجهیزات الکتریکی در مدارها و شبکهها باید از اتصالات مناسب برای برقراری ارتباط با شبکه و یا سایر تجهیزات بهرهمند باشند . ادوات اتصالات در شبکههای الکتریکی با توجه به سطح ولتاژ شبکه و نیاز به استحکام ، خاصیتهای عایقی ، مقاومتهای حرارتی و سایر فاکتورهای فیزیکی و شیمیایی انتخاب میشوند . کاربردهای مختلفی در صنعت و واحدهای غیر صنعتی برای اتصالات الکتریکی وجود دارد . در حوزه صنعت برای اتصالات ماشین آلات صنعتی ، موتورها ، کابلها ، وسیلههای حفاظتی ، ترانسها ، سیمکشی تابلوهای برق و … لوازم اتصال دهنده مخصوص و متعددی استفاده میشود . آن دسته از اتصالات الکتریکی که در صنعت و در سطح ولتاژی یا مقاومت فیزیکی بالاتری مورد استفاده قرار میگیرد به دلیل بالا بودن تنشهای الکتریکی و مکانیکی در…
-
ترمینال ریلی
در یک مجموعه که دارای یک یا چند شبکه الکتریکی است همواره بحث برقراری اتصالات الکتریکی مطرح است . این اتصالات در واقع متصل کردن تجهیزات و ادوات الکتریکی به یکدیگر است . اتصال تجهیزات الکتریکی به شبکه برق ، اتصال هادیها ، اتصال تجهیزات به یکدیگر و بسیاری از کاربردهای این چنینی همیشه نیازمند واسطههایی برای برقراری ارتباط بین المانهای ذکر شده است . با توجه به کاربرد و نقش و اهمیت تجهیزات الکتریکی در مدارها و شبکهها باید از اتصالات مناسب برای برقراری ارتباط با شبکه و یا سایر تجهیزات بهرهمند باشند . ادوات اتصالات در شبکههای الکتریکی با توجه به سطح ولتاژ شبکه و نیاز به استحکام ، خاصیتهای عایقی ، مقاومتهای حرارتی و سایر فاکتورهای فیزیکی و شیمیایی انتخاب میشوند . کاربردهای مختلفی در صنعت و واحدهای غیر صنعتی برای اتصالات الکتریکی وجود دارد . در حوزه صنعت برای اتصالات ماشین آلات صنعتی ، موتورها ، کابلها ، وسیلههای حفاظتی ، ترانسها ، سیمکشی تابلوهای برق و … لوازم اتصال دهنده مخصوص و متعددی استفاده میشود . آن دسته از اتصالات الکتریکی که در صنعت و در سطح ولتاژی یا مقاومت فیزیکی بالاتری مورد استفاده قرار میگیرد به دلیل بالا بودن تنشهای الکتریکی و مکانیکی در…
-
ترمینال سرامیکی
در یک مجموعه که دارای یک یا چند شبکه الکتریکی است همواره بحث برقراری اتصالات الکتریکی مطرح است . این اتصالات در واقع متصل کردن تجهیزات و ادوات الکتریکی به یکدیگر است . اتصال تجهیزات الکتریکی به شبکه برق ، اتصال هادیها ، اتصال تجهیزات به یکدیگر و بسیاری از کاربردهای این چنینی همیشه نیازمند واسطههایی برای برقراری ارتباط بین المانهای ذکر شده است . با توجه به کاربرد و نقش و اهمیت تجهیزات الکتریکی در مدارها و شبکهها باید از اتصالات مناسب برای برقراری ارتباط با شبکه و یا سایر تجهیزات بهرهمند باشند . ادوات اتصالات در شبکههای الکتریکی با توجه به سطح ولتاژ شبکه و نیاز به استحکام ، خاصیتهای عایقی ، مقاومتهای حرارتی و سایر فاکتورهای فیزیکی و شیمیایی انتخاب میشوند . کاربردهای مختلفی در صنعت و واحدهای غیر صنعتی برای اتصالات الکتریکی وجود دارد . در حوزه صنعت برای اتصالات ماشین آلات صنعتی ، موتورها ، کابلها ، وسیلههای حفاظتی ، ترانسها ، سیمکشی تابلوهای برق و … لوازم اتصال دهنده مخصوص و متعددی استفاده میشود . آن دسته از اتصالات الکتریکی که در صنعت و در سطح ولتاژی یا مقاومت فیزیکی بالاتری مورد استفاده قرار میگیرد به دلیل بالا بودن تنشهای الکتریکی و مکانیکی در…
-
ترمینال پیچی
در یک مجموعه که دارای یک یا چند شبکه الکتریکی است همواره بحث برقراری اتصالات الکتریکی مطرح است . این اتصالات در واقع متصل کردن تجهیزات و ادوات الکتریکی به یکدیگر است . اتصال تجهیزات الکتریکی به شبکه برق ، اتصال هادیها ، اتصال تجهیزات به یکدیگر و بسیاری از کاربردهای این چنینی همیشه نیازمند واسطههایی برای برقراری ارتباط بین المانهای ذکر شده است . با توجه به کاربرد و نقش و اهمیت تجهیزات الکتریکی در مدارها و شبکهها باید از اتصالات مناسب برای برقراری ارتباط با شبکه و یا سایر تجهیزات بهرهمند باشند . ادوات اتصالات در شبکههای الکتریکی با توجه به سطح ولتاژ شبکه و نیاز به استحکام ، خاصیتهای عایقی ، مقاومتهای حرارتی و سایر فاکتورهای فیزیکی و شیمیایی انتخاب میشوند . کاربردهای مختلفی در صنعت و واحدهای غیر صنعتی برای اتصالات الکتریکی وجود دارد . در حوزه صنعت برای اتصالات ماشین آلات صنعتی ، موتورها ، کابلها ، وسیلههای حفاظتی ، ترانسها ، سیمکشی تابلوهای برق و … لوازم اتصال دهنده مخصوص و متعددی استفاده میشود . آن دسته از اتصالات الکتریکی که در صنعت و در سطح ولتاژی یا مقاومت فیزیکی بالاتری مورد استفاده قرار میگیرد به دلیل بالا بودن تنشهای الکتریکی و مکانیکی در…
-
گلند
در یک مجموعه که دارای یک یا چند شبکه الکتریکی است همواره بحث برقراری اتصالات الکتریکی مطرح است . این اتصالات در واقع متصل کردن تجهیزات و ادوات الکتریکی به یکدیگر است . اتصال تجهیزات الکتریکی به شبکه برق ، اتصال هادیها ، اتصال تجهیزات به یکدیگر و بسیاری از کاربردهای این چنینی همیشه نیازمند واسطههایی برای برقراری ارتباط بین المانهای ذکر شده است . با توجه به کاربرد و نقش و اهمیت تجهیزات الکتریکی در مدارها و شبکهها باید از اتصالات مناسب برای برقراری ارتباط با شبکه و یا سایر تجهیزات بهرهمند باشند . ادوات اتصالات در شبکههای الکتریکی با توجه به سطح ولتاژ شبکه و نیاز به استحکام ، خاصیتهای عایقی ، مقاومتهای حرارتی و سایر فاکتورهای فیزیکی و شیمیایی انتخاب میشوند . کاربردهای مختلفی در صنعت و واحدهای غیر صنعتی برای اتصالات الکتریکی وجود دارد . در حوزه صنعت برای اتصالات ماشین آلات صنعتی ، موتورها ، کابلها ، وسیلههای حفاظتی ، ترانسها ، سیمکشی تابلوهای برق و … لوازم اتصال دهنده مخصوص و متعددی استفاده میشود . آن دسته از اتصالات الکتریکی که در صنعت و در سطح ولتاژی یا مقاومت فیزیکی بالاتری مورد استفاده قرار میگیرد به دلیل بالا بودن تنشهای الکتریکی و مکانیکی در…
-
مف و کابل شو
در یک مجموعه که دارای یک یا چند شبکه الکتریکی است همواره بحث برقراری اتصالات الکتریکی مطرح است . این اتصالات در واقع متصل کردن تجهیزات و ادوات الکتریکی به یکدیگر است . اتصال تجهیزات الکتریکی به شبکه برق ، اتصال هادیها ، اتصال تجهیزات به یکدیگر و بسیاری از کاربردهای این چنینی همیشه نیازمند واسطههایی برای برقراری ارتباط بین المانهای ذکر شده است . با توجه به کاربرد و نقش و اهمیت تجهیزات الکتریکی در مدارها و شبکهها باید از اتصالات مناسب برای برقراری ارتباط با شبکه و یا سایر تجهیزات بهرهمند باشند . ادوات اتصالات در شبکههای الکتریکی با توجه به سطح ولتاژ شبکه و نیاز به استحکام ، خاصیتهای عایقی ، مقاومتهای حرارتی و سایر فاکتورهای فیزیکی و شیمیایی انتخاب میشوند . کاربردهای مختلفی در صنعت و واحدهای غیر صنعتی برای اتصالات الکتریکی وجود دارد . در حوزه صنعت برای اتصالات ماشین آلات صنعتی ، موتورها ، کابلها ، وسیلههای حفاظتی ، ترانسها ، سیمکشی تابلوهای برق و … لوازم اتصال دهنده مخصوص و متعددی استفاده میشود . آن دسته از اتصالات الکتریکی که در صنعت و در سطح ولتاژی یا مقاومت فیزیکی بالاتری مورد استفاده قرار میگیرد به دلیل بالا بودن تنشهای الکتریکی و مکانیکی در…
-
سرسیم و وایرشو
در یک مجموعه که دارای یک یا چند شبکه الکتریکی است همواره بحث برقراری اتصالات الکتریکی مطرح است . این اتصالات در واقع متصل کردن تجهیزات و ادوات الکتریکی به یکدیگر است . اتصال تجهیزات الکتریکی به شبکه برق ، اتصال هادیها ، اتصال تجهیزات به یکدیگر و بسیاری از کاربردهای این چنینی همیشه نیازمند واسطههایی برای برقراری ارتباط بین المانهای ذکر شده است . با توجه به کاربرد و نقش و اهمیت تجهیزات الکتریکی در مدارها و شبکهها باید از اتصالات مناسب برای برقراری ارتباط با شبکه و یا سایر تجهیزات بهرهمند باشند . ادوات اتصالات در شبکههای الکتریکی با توجه به سطح ولتاژ شبکه و نیاز به استحکام ، خاصیتهای عایقی ، مقاومتهای حرارتی و سایر فاکتورهای فیزیکی و شیمیایی انتخاب میشوند . کاربردهای مختلفی در صنعت و واحدهای غیر صنعتی برای اتصالات الکتریکی وجود دارد . در حوزه صنعت برای اتصالات ماشین آلات صنعتی ، موتورها ، کابلها ، وسیلههای حفاظتی ، ترانسها ، سیمکشی تابلوهای برق و … لوازم اتصال دهنده مخصوص و متعددی استفاده میشود . آن دسته از اتصالات الکتریکی که در صنعت و در سطح ولتاژی یا مقاومت فیزیکی بالاتری مورد استفاده قرار میگیرد به دلیل بالا بودن تنشهای الکتریکی و مکانیکی در…
-
کلید و پریز
در یک مجموعه که دارای یک یا چند شبکه الکتریکی است همواره بحث برقراری اتصالات الکتریکی مطرح است . این اتصالات در واقع متصل کردن تجهیزات و ادوات الکتریکی به یکدیگر است . اتصال تجهیزات الکتریکی به شبکه برق ، اتصال هادیها ، اتصال تجهیزات به یکدیگر و بسیاری از کاربردهای این چنینی همیشه نیازمند واسطههایی برای برقراری ارتباط بین المانهای ذکر شده است . با توجه به کاربرد و نقش و اهمیت تجهیزات الکتریکی در مدارها و شبکهها باید از اتصالات مناسب برای برقراری ارتباط با شبکه و یا سایر تجهیزات بهرهمند باشند . ادوات اتصالات در شبکههای الکتریکی با توجه به سطح ولتاژ شبکه و نیاز به استحکام ، خاصیتهای عایقی ، مقاومتهای حرارتی و سایر فاکتورهای فیزیکی و شیمیایی انتخاب میشوند . کاربردهای مختلفی در صنعت و واحدهای غیر صنعتی برای اتصالات الکتریکی وجود دارد . در حوزه صنعت برای اتصالات ماشین آلات صنعتی ، موتورها ، کابلها ، وسیلههای حفاظتی ، ترانسها ، سیمکشی تابلوهای برق و … لوازم اتصال دهنده مخصوص و متعددی استفاده میشود . آن دسته از اتصالات الکتریکی که در صنعت و در سطح ولتاژی یا مقاومت فیزیکی بالاتری مورد استفاده قرار میگیرد به دلیل بالا بودن تنشهای الکتریکی و مکانیکی در…
-
سوکت صنعتی
در یک مجموعه که دارای یک یا چند شبکه الکتریکی است همواره بحث برقراری اتصالات الکتریکی مطرح است . این اتصالات در واقع متصل کردن تجهیزات و ادوات الکتریکی به یکدیگر است . اتصال تجهیزات الکتریکی به شبکه برق ، اتصال هادیها ، اتصال تجهیزات به یکدیگر و بسیاری از کاربردهای این چنینی همیشه نیازمند واسطههایی برای برقراری ارتباط بین المانهای ذکر شده است . با توجه به کاربرد و نقش و اهمیت تجهیزات الکتریکی در مدارها و شبکهها باید از اتصالات مناسب برای برقراری ارتباط با شبکه و یا سایر تجهیزات بهرهمند باشند . ادوات اتصالات در شبکههای الکتریکی با توجه به سطح ولتاژ شبکه و نیاز به استحکام ، خاصیتهای عایقی ، مقاومتهای حرارتی و سایر فاکتورهای فیزیکی و شیمیایی انتخاب میشوند . کاربردهای مختلفی در صنعت و واحدهای غیر صنعتی برای اتصالات الکتریکی وجود دارد . در حوزه صنعت برای اتصالات ماشین آلات صنعتی ، موتورها ، کابلها ، وسیلههای حفاظتی ، ترانسها ، سیمکشی تابلوهای برق و … لوازم اتصال دهنده مخصوص و متعددی استفاده میشود . آن دسته از اتصالات الکتریکی که در صنعت و در سطح ولتاژی یا مقاومت فیزیکی بالاتری مورد استفاده قرار میگیرد به دلیل بالا بودن تنشهای الکتریکی و مکانیکی در…
-
محافظ و چندراهی برق
در یک مجموعه که دارای یک یا چند شبکه الکتریکی است همواره بحث برقراری اتصالات الکتریکی مطرح است . این اتصالات در واقع متصل کردن تجهیزات و ادوات الکتریکی به یکدیگر است . اتصال تجهیزات الکتریکی به شبکه برق ، اتصال هادیها ، اتصال تجهیزات به یکدیگر و بسیاری از کاربردهای این چنینی همیشه نیازمند واسطههایی برای برقراری ارتباط بین المانهای ذکر شده است . با توجه به کاربرد و نقش و اهمیت تجهیزات الکتریکی در مدارها و شبکهها باید از اتصالات مناسب برای برقراری ارتباط با شبکه و یا سایر تجهیزات بهرهمند باشند . ادوات اتصالات در شبکههای الکتریکی با توجه به سطح ولتاژ شبکه و نیاز به استحکام ، خاصیتهای عایقی ، مقاومتهای حرارتی و سایر فاکتورهای فیزیکی و شیمیایی انتخاب میشوند . کاربردهای مختلفی در صنعت و واحدهای غیر صنعتی برای اتصالات الکتریکی وجود دارد . در حوزه صنعت برای اتصالات ماشین آلات صنعتی ، موتورها ، کابلها ، وسیلههای حفاظتی ، ترانسها ، سیمکشی تابلوهای برق و … لوازم اتصال دهنده مخصوص و متعددی استفاده میشود . آن دسته از اتصالات الکتریکی که در صنعت و در سطح ولتاژی یا مقاومت فیزیکی بالاتری مورد استفاده قرار میگیرد به دلیل بالا بودن تنشهای الکتریکی و مکانیکی در…
-
سوکت نظامی
در یک مجموعه که دارای یک یا چند شبکه الکتریکی است همواره بحث برقراری اتصالات الکتریکی مطرح است . این اتصالات در واقع متصل کردن تجهیزات و ادوات الکتریکی به یکدیگر است . اتصال تجهیزات الکتریکی به شبکه برق ، اتصال هادیها ، اتصال تجهیزات به یکدیگر و بسیاری از کاربردهای این چنینی همیشه نیازمند واسطههایی برای برقراری ارتباط بین المانهای ذکر شده است . با توجه به کاربرد و نقش و اهمیت تجهیزات الکتریکی در مدارها و شبکهها باید از اتصالات مناسب برای برقراری ارتباط با شبکه و یا سایر تجهیزات بهرهمند باشند . ادوات اتصالات در شبکههای الکتریکی با توجه به سطح ولتاژ شبکه و نیاز به استحکام ، خاصیتهای عایقی ، مقاومتهای حرارتی و سایر فاکتورهای فیزیکی و شیمیایی انتخاب میشوند . کاربردهای مختلفی در صنعت و واحدهای غیر صنعتی برای اتصالات الکتریکی وجود دارد . در حوزه صنعت برای اتصالات ماشین آلات صنعتی ، موتورها ، کابلها ، وسیلههای حفاظتی ، ترانسها ، سیمکشی تابلوهای برق و … لوازم اتصال دهنده مخصوص و متعددی استفاده میشود . آن دسته از اتصالات الکتریکی که در صنعت و در سطح ولتاژی یا مقاومت فیزیکی بالاتری مورد استفاده قرار میگیرد به دلیل بالا بودن تنشهای الکتریکی و مکانیکی در…
-
چسب برق
در یک مجموعه که دارای یک یا چند شبکه الکتریکی است همواره بحث برقراری اتصالات الکتریکی مطرح است . این اتصالات در واقع متصل کردن تجهیزات و ادوات الکتریکی به یکدیگر است . اتصال تجهیزات الکتریکی به شبکه برق ، اتصال هادیها ، اتصال تجهیزات به یکدیگر و بسیاری از کاربردهای این چنینی همیشه نیازمند واسطههایی برای برقراری ارتباط بین المانهای ذکر شده است . با توجه به کاربرد و نقش و اهمیت تجهیزات الکتریکی در مدارها و شبکهها باید از اتصالات مناسب برای برقراری ارتباط با شبکه و یا سایر تجهیزات بهرهمند باشند . ادوات اتصالات در شبکههای الکتریکی با توجه به سطح ولتاژ شبکه و نیاز به استحکام ، خاصیتهای عایقی ، مقاومتهای حرارتی و سایر فاکتورهای فیزیکی و شیمیایی انتخاب میشوند . کاربردهای مختلفی در صنعت و واحدهای غیر صنعتی برای اتصالات الکتریکی وجود دارد . در حوزه صنعت برای اتصالات ماشین آلات صنعتی ، موتورها ، کابلها ، وسیلههای حفاظتی ، ترانسها ، سیمکشی تابلوهای برق و … لوازم اتصال دهنده مخصوص و متعددی استفاده میشود . آن دسته از اتصالات الکتریکی که در صنعت و در سطح ولتاژی یا مقاومت فیزیکی بالاتری مورد استفاده قرار میگیرد به دلیل بالا بودن تنشهای الکتریکی و مکانیکی در…
-
ترمینال شاخه ای

 تجهیزات فرمان و هشدار
تجهیزات فرمان و هشدار

 تجهیزات حفاظت و سوئیچینگ
تجهیزات حفاظت و سوئیچینگ



 رله کنترلی و نمایشی
رله کنترلی و نمایشی

 تجهیزات اندازه گیری
تجهیزات اندازه گیری
 تجهیزات ابزار دقیق
تجهیزات ابزار دقیق

 تجهیزات راه اندازی موتور
تجهیزات راه اندازی موتور